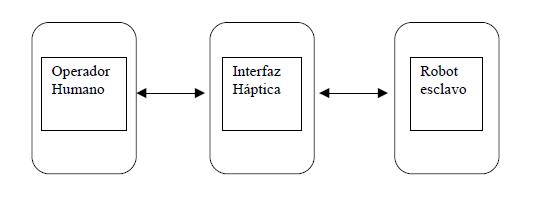
Se presenta el diseño de un dispositivo háptico activo que integra mecánica, sensores de fuerza y actuadores, sistemas electrónicos de control e informática aplicada. Las interfaces hápticas son dispositivos que presentan información táctil y de fuerza a un operador humano que está interactuando con un objeto real o simulado a través de un ordenador. La teleoperación con dispositivos hápticos permite que el operador controle a distancia el movimiento y fuerza ejercida sobre un robot manipulador.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}