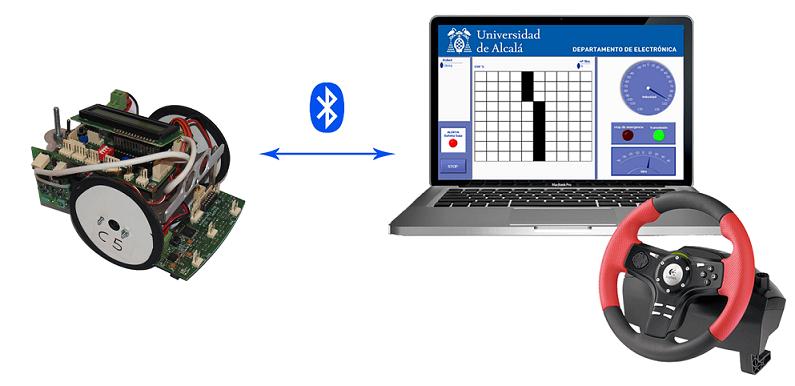
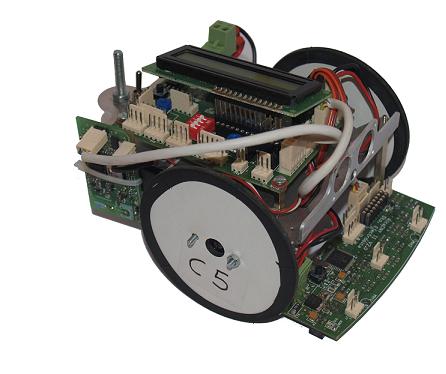
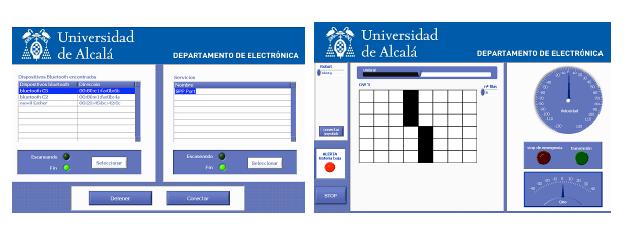
Este documento presenta un sistema de monitorización y telecontrol de una plataforma móvil robótica utilizando una conexión inalámbrica Bluetooth. Se ha diseñado una aplicación con una interfaz de usuario atractiva y sencilla de manejar, que permite a una persona interactuar con un robot en tiempo real y de forma remota. Este sistema es una herramienta para acercar el mundo de la robótica a personas con diferentes niveles de conocimiento, puesto que permite explicar de forma sencilla los diferentes elementos que forman un robot, así como su funcionamiento y su interacción con el entorno. El sistema también puede ser utilizado como herramienta didáctica para prácticas de asignaturas donde se estudien Sistemas Empotrados, LabView y Robótica Básica.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}