Laboratorio remoto para la programación de robots industriales abb en lenguaje rapid
Magdalena, R., Muñoz, J., Rosado, A., Ruiz,, G. y Segura, R.(04/0) .Laboratorio remoto para la programación de robots industriales abb en lenguaje rapid. .En: . ()
Ficheros
(Some files may be inaccessible until you login with your e-spacio credentials)
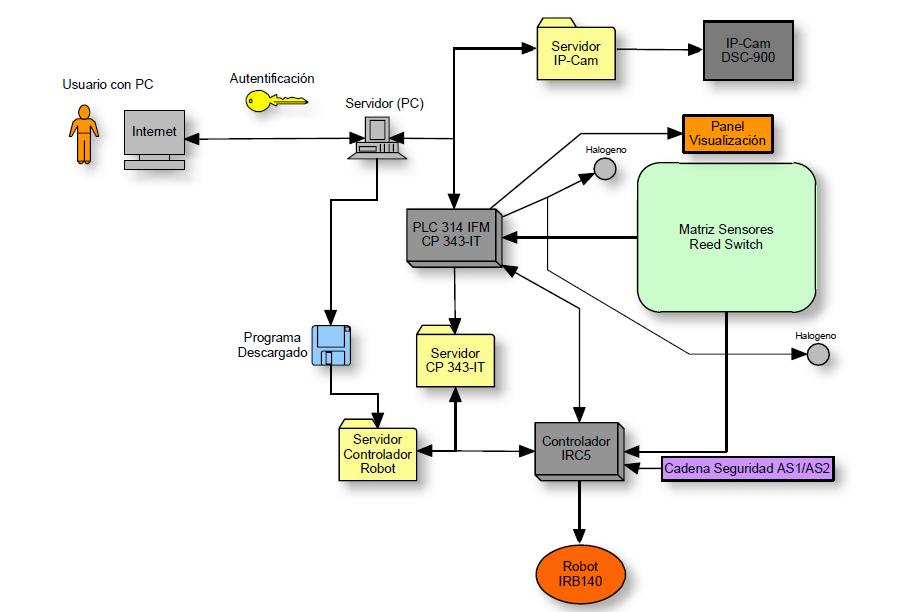
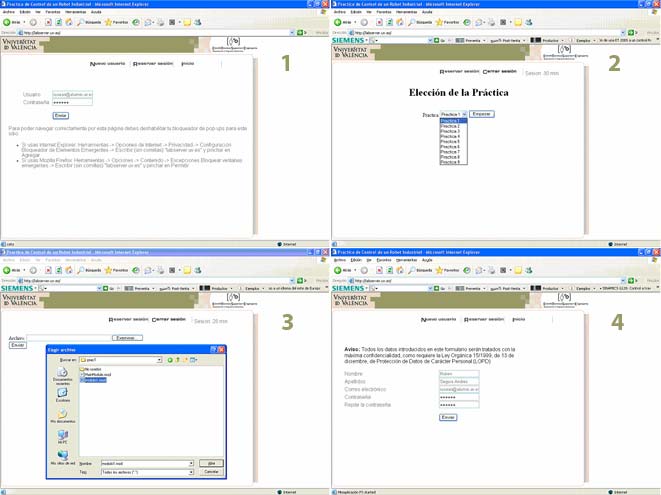
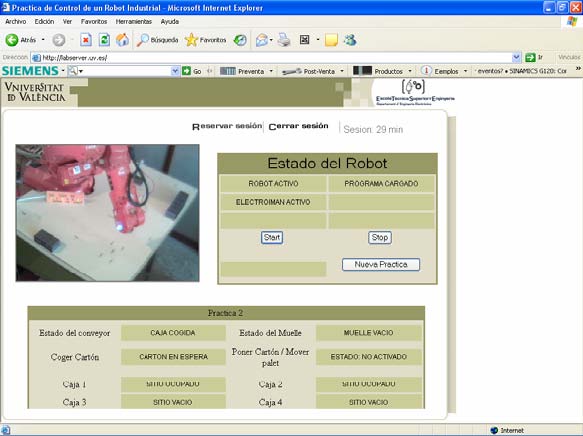
El aprendizaje efectivo del lenguaje de programación para robots necesita de una constante realización de prácticas. Este trabajo describe la metodología llevada a cabo para conseguir el aprendizaje del lenguaje RAPID. Se ha desarrollado un sistema de aprendizaje para prácticas remotas y presenciales que emplea un robot IRB140 de ABB, un PLC con tarjeta Ethernet y servidor web, una cámara IP para visualizar la ejecución de la práctica en tiempo real, una matriz de sensores electromagnéticos y un servidor web PC. El usuario puede acceder desde un navegador web a la programación del robot a cualquier hora del día, descargar remotamente el programa y observar en tiempo real el resultado, obteniendo información de los movimientos realizados por el robot. Con ello, se desea conseguir que el estudiante pueda realizar prácticas reales de programación de robots, tanto de forma presencial como remota.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}