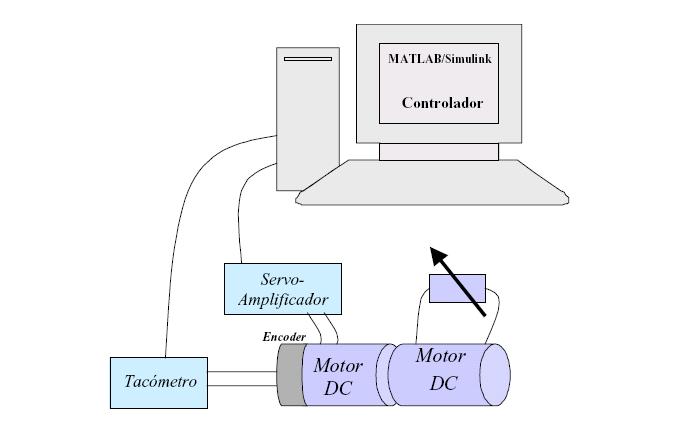
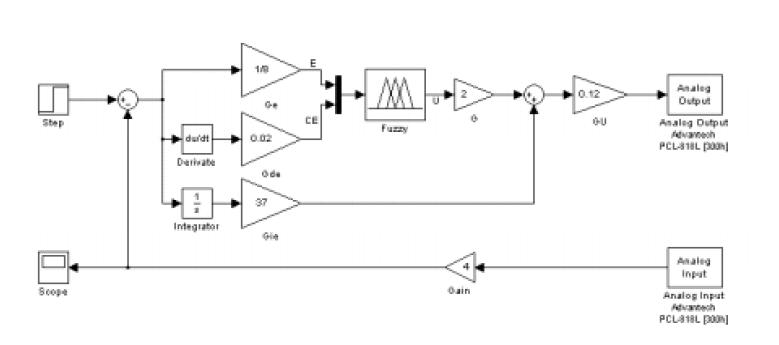
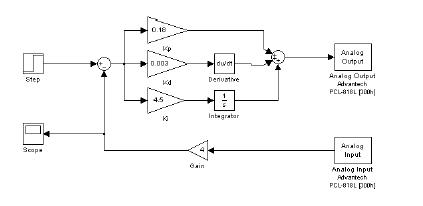
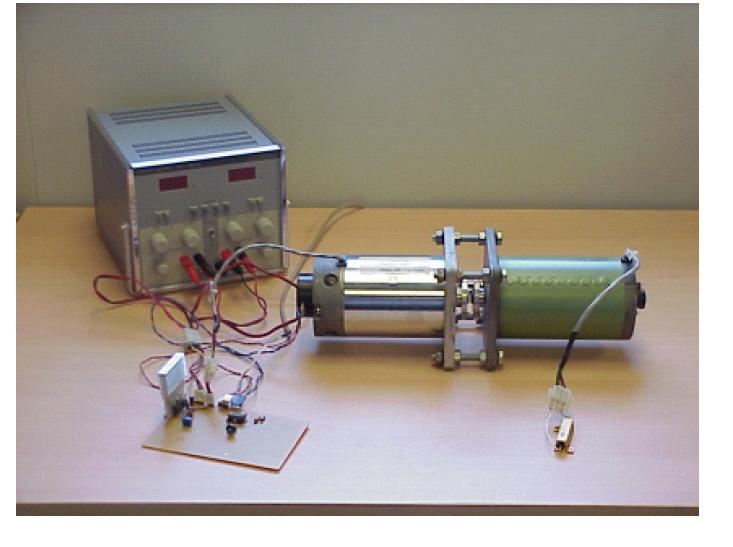
MATLAB posee una serie de toolbox mediante los cuáles se puede realizar el prototipado rápido para sistemas de control borroso. En este artículo se resumen estos toolbox y qué es lo que se debe disponer para llevar a cabo una práctica de laboratorio para el control borroso de velocidad de un motor de corriente continua e imán permanente.
Editor(es)
Instituto Universitario de Microelectrónica Aplicada Universidad de Las Palmas de Gran Canaria





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}